Overview of BMS Communication Protocols
BMS relies on a variety of communication protocols to ensure data transfer between components. Communication protocols enable real-time monitoring, control, and optimization of battery performance. These BMS communication protocols guarantee timely and effective communication with other systems or components in a specific application.
Think about installing a BMS in an electric vehicle (EV) for example. Here, the BMS is the core of the system that constantly monitors and manages the parameters of the battery’s SOC, SoH, temperature, current, and voltage. Meanwhile, this raw data needs to be communicated to the vehicle’s central control unit. Then, using this data, the central control unit will be able to issue commands to the BMS, for example, to limit the current output, to start the cooling process, or to isolate the battery in case of critical problems. The communication protocol is a key player in allowing the information to be exchanged.
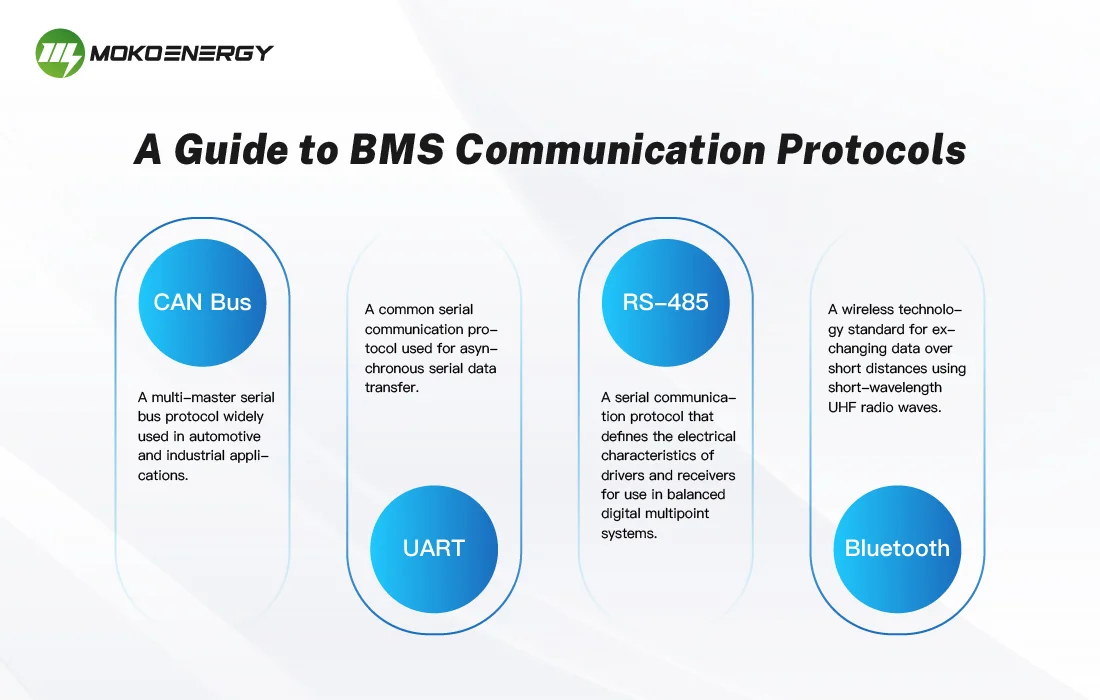
4 Communication Protocols Commonly Used in BMS
CAN Bus
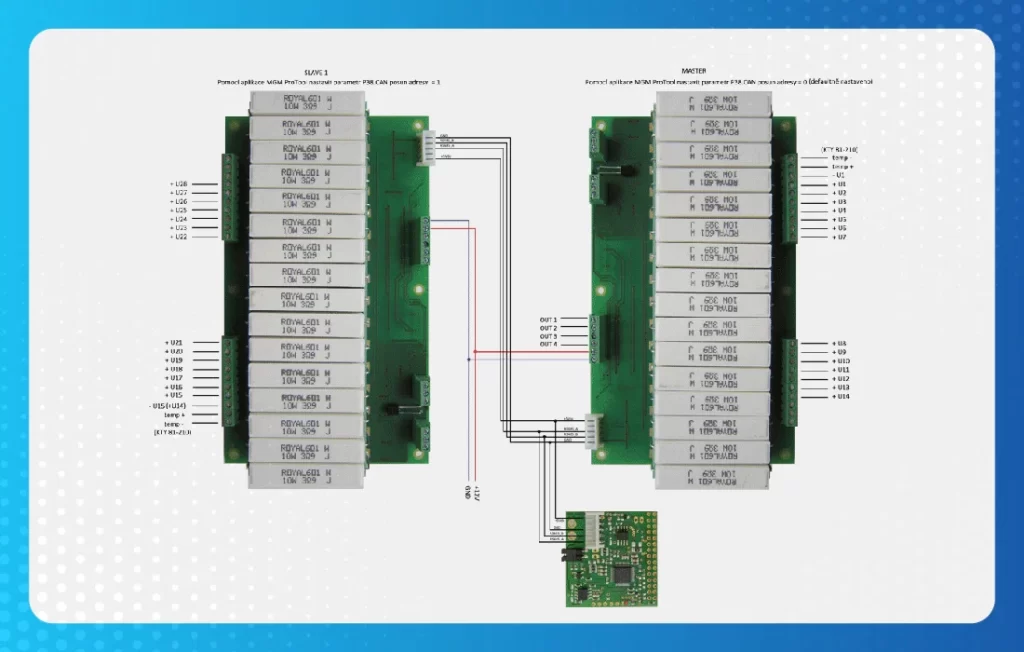
CAN Bus (Controller Area Network) is a time-proven and widely adopted communication protocol for cars and many other fields. It is recognized for its ability to handle errors and errors effectively, as well as its failure tolerance, which makes it the most popular application for BMS systems. It is the bridge that the BMS uses to communicate with other vehicle systems in a very efficient way, thus ensuring that the integration and the data exchange are done in real-time.
CAN Bus is a multi-master based system, so that different nodes can transmit data on the same bus without a dedicated master node. Through this decentralized method, the system becomes more stable and fault-tolerant, as it continues to function even when a single node fails. Besides, CAN Bus has advanced error detection and correction methods that make it very robust against electromagnetic interference (EMI) and other noise sources.
UART (Universal Asynchronous Receiver-Transmitter)
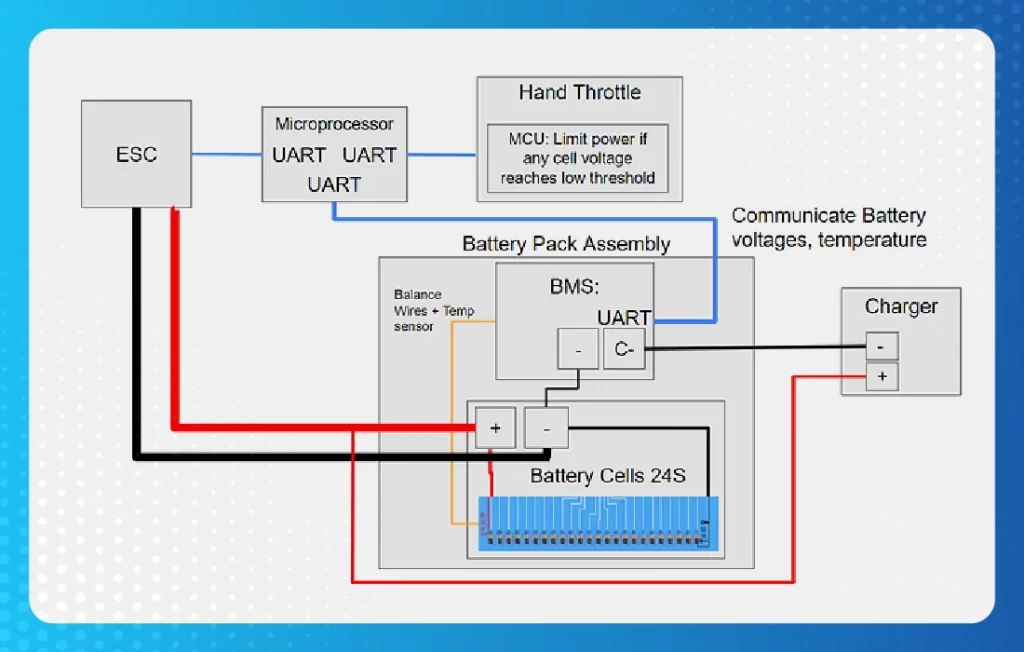
The Universal Asynchronous Receiver-Transmitter (UART) protocol is a simple and inexpensive way to communicate with the BMS. The simplicity of this topology renders it optimal for low speed and short distance applications, where low complexity and low power are the main factors to be considered.
UART uses the point-to-point communication principle, where data is sent serially from one point – the transmitter to another point – the receiver. Although UART is not as advanced as other communication protocols like error detection and multi-drop, it is still a good choice for applications that need to transfer data only with moderate requirements.
RS485
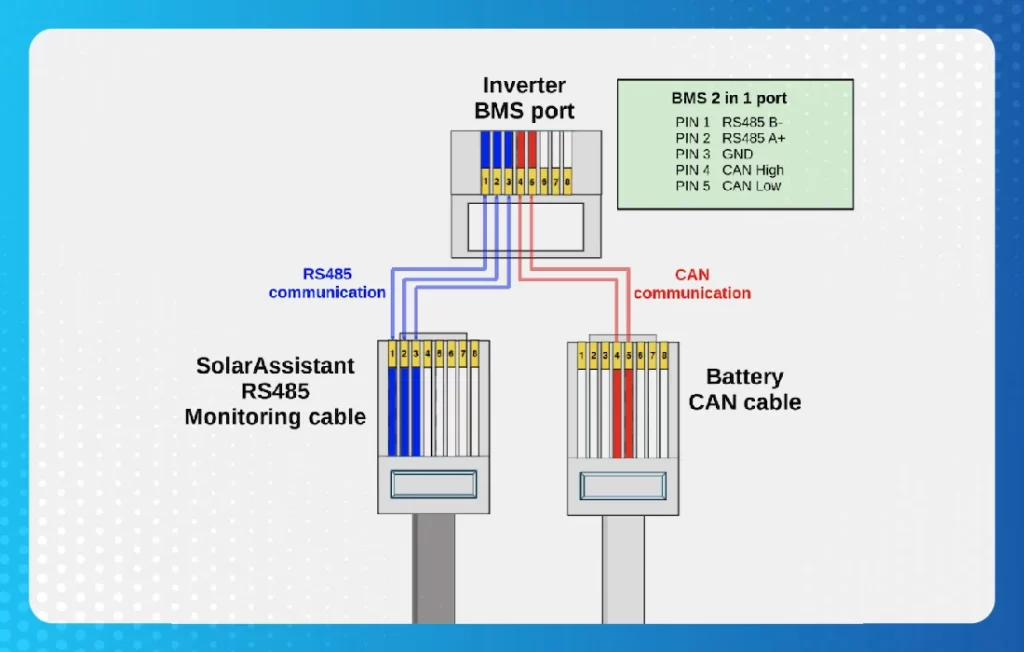
The RS485 protocol is widely applied in BMS systems for long-distance communication. It supports a flexible multi-drop system where a bus can accommodate multiple devices. RS485 is most useful in large-scale energy storage systems where batteries are distributed over a wide area.
RS485 is a half-duplex transmission method that allows the data to travel in both directions but not at the same time. It is this protocol that is used for transmitting data over long distances (up to 1.2 km) with very good noise immunity and hence it is applicable for industrial and commercial use.
Bluetooth
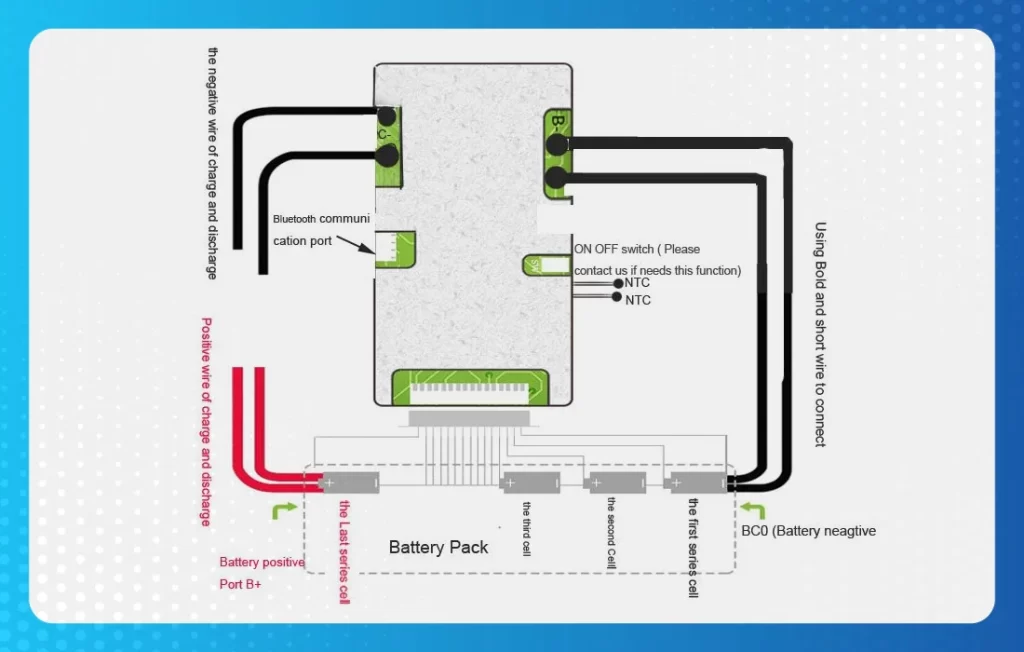
Bluetooth is a protocol of wireless communication that brings convenience and flexibility to the current BMS applications. It has very low power consumption and wide integration options, making it the best choice for portable and mobile battery systems. Bluetooth makes it possible to monitor and control battery systems without wires, which is a lot simpler than the traditional way.
The range of Bluetooth is quite short (usually up to 100 meters), but it provides a very reliable and secure communication channel between the BMS and external devices (like smartphones, tablets, etc.) for the purposes of data transfer. This feature enables its usage in applications that need remote monitoring and control, or in settings where physical access to the battery system may be a limiting factor.
How to Choose a Suitable Protocol?
When selecting a communication protocol for your BMS, several factors should be considered:
- Speed: Determine the data rate requirements for your application and choose a protocol that meets those needs.
- Distance: Evaluate the physical distance between BMS components and select a protocol with suitable range capabilities.
- Multi-drop Support: If multiple devices need to be connected, prioritize protocols with multi-drop capabilities, such as CAN Bus or RS485.
- Cost: Consider the overall cost of implementation, including hardware, software, and maintenance expenses.
- Power Consumption: For battery-powered or portable applications, choose low-power protocols like UART or Bluetooth.
- Reliability and Fault Tolerance: Assess the level of robustness and error handling required for your application.
| Protocol | Speed | Distance | Multi-drop | Cost |
|---|---|---|---|---|
| CAN Bus | High | Medium | Yes | Moderate |
| UART | Low | Short | No | Low |
| RS485 | Medium | Long | Yes | Moderate |
| Bluetooth | Medium | Short | Limited | Moderate |
By carefully evaluating these factors and matching them with your specific BMS requirements, you can make an informed decision and select the most suitable communication protocol.
Closing Thoughts
As battery technology advances and finds more applications, the role of efficient and reliable communication protocols in the BMS cannot be overemphasized. Regardless of whether you are designing a BMS for electric vehicles, renewable energy storage systems, or portable electronic devices, the ability to analyze the strengths and limitations of each protocol is an important success factor.
It is important to remember that the choice of communication protocol is not a universal answer for all situations. It calls for a careful examination of your particular needs and a profound knowledge of the trade-offs that are connected with it. Don’t be afraid to consult with an expert or try some experienced professionals in the field to make sure that your decision is the right one for your BMS application.
Apply communication protocols, and your BMS will deliver its full potential.